TECHNOLOGY
Laser scanning

PROVIDED DATA
- Counting
- Classification
- Speed
- Height
- Width
- 3D profile
DESCRIPTION
The 3D profiling system can provide a high resolution 3D file of the vehicles and measure them in height, width, length and volume.
It is integrated in our Weighing in Motion (WIM) systems.
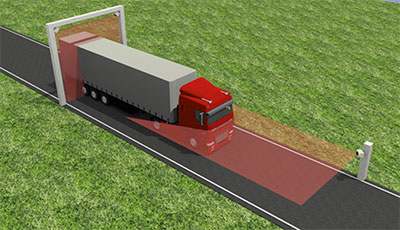
The system is composed of 3 laser scanners: two are installed on the left and right sides of a gantry, the third one is installed on a side pole (or on a second gantry).
The first two lasers continuously scan both sides and the top of the vehicle, while the third detects the position and movement. The result is a very accurate 3D detection of:
- Length
- Height
- Width
- Speed
- Profile
- Vehicle class
The system is also able to provide a classification of vehicles and give trigger signals when the vehicle begins and when it ends. The system is based on laser scanner, which has a scan angle of 96° with high definition. (274 measurements in 96° with an angular resolution of 0.35°).
One of the three LIDAR sensors used in the profiling system acts as master unit and combines the informations given by the other two to create an accurate 3D profile of the vehicle.
The transit data, together with the 3D file, can be retrieved from the master unit through Ethernet port.

APPLICATIONS
The profiling system can be used in a variety of applications, wherever it’s necessary to have an accurate detection of the transit.
Typical applications are:
- Harbour trucks’ analysis
- Analysis of vehicles at custom borders
- Weight in motion when vehicles’ dimensions are needed
- Tolling systems
- Measuring vehicles’ silhouettes for alarm when different size


INSTALLATION
3D-PROFILER system need a gantry for the first two lasers: one on the right and one on the left of the lane and a third front laser.
If only one lane is to be monitored, the front laser can be installed horizontally on the side of the road on a pole of about one meter in height.
In case of multi-lane monitoring, the front laser must be installed vertically, in the middle of each lane, on a second gantry.
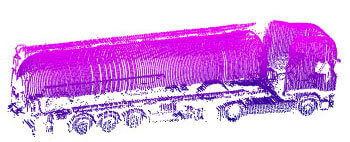
3D IMAGE
The 3D file generated by the system is “Point Cloud”, which is a standard for 3d images generated by lasers. With special software the image can be rotated to offer different points of view of the vehicle.